T2463.最小移动总距离
dp, https://leetcode.cn/problems/minimum-total-distance-traveled/
X 轴上有一些机器人和工厂。给你一个整数数组 robot ,其中 robot[i] 是第 i 个机器人的位置。再给你一个二维整数数组 factory ,其中 factory[j] = [positionj, limitj] ,表示第 j 个工厂的位置在 positionj ,且第 j 个工厂最多可以修理 limitj 个机器人。
每个机器人所在的位置 互不相同 。每个工厂所在的位置也 互不相同 。注意一个机器人可能一开始跟一个工厂在 相同的位置 。
所有机器人一开始都是坏的,他们会沿着设定的方向一直移动。设定的方向要么是 X 轴的正方向,要么是 X 轴的负方向。当一个机器人经过一个没达到上限的工厂时,这个工厂会维修这个机器人,且机器人停止移动。
任何时刻,你都可以设置 部分 机器人的移动方向。你的目标是最小化所有机器人总的移动距离。
请你返回所有机器人移动的最小总距离。测试数据保证所有机器人都可以被维修。
注意:
- 所有机器人移动速度相同。
- 如果两个机器人移动方向相同,它们永远不会碰撞。
- 如果两个机器人迎面相遇,它们也不会碰撞,它们彼此之间会擦肩而过。
- 如果一个机器人经过了一个已经达到上限的工厂,机器人会当作工厂不存在,继续移动。
- 机器人从位置
x到位置y的移动距离为|y - x|。
示例 1:
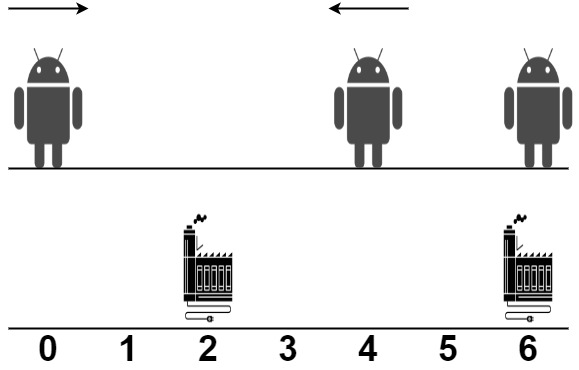
输入:robot = [0,4,6], factory = [[2,2],[6,2]]
输出:4
解释:如上图所示:
- 第一个机器人从位置 0 沿着正方向移动,在第一个工厂处维修。
- 第二个机器人从位置 4 沿着负方向移动,在第一个工厂处维修。
- 第三个机器人在位置 6 被第二个工厂维修,它不需要移动。
第一个工厂的维修上限是 2 ,它维修了 2 个机器人。
第二个工厂的维修上限是 2 ,它维修了 1 个机器人。
总移动距离是 |2 - 0| + |2 - 4| + |6 - 6| = 4 。没有办法得到比 4 更少的总移动距离。示例 2:
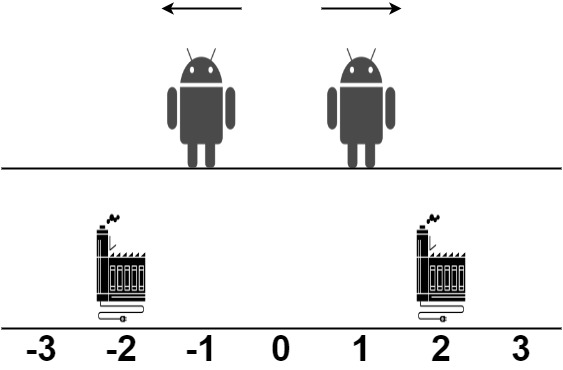
输入:robot = [1,-1], factory = [[-2,1],[2,1]]
输出:2
解释:如上图所示:
- 第一个机器人从位置 1 沿着正方向移动,在第二个工厂处维修。
- 第二个机器人在位置 -1 沿着负方向移动,在第一个工厂处维修。
第一个工厂的维修上限是 1 ,它维修了 1 个机器人。
第二个工厂的维修上限是 1 ,它维修了 1 个机器人。
总移动距离是 |2 - 1| + |(-2) - (-1)| = 2 。没有办法得到比 2 更少的总移动距离。提示:
1 <= robot.length, factory.length <= 100factory[j].length == 2-10^9 <= robot[i], positionj <= 10^90 <= limitj <= robot.length- 测试数据保证所有机器人都可以被维修。
这是一个经典的动态规划问题。为了使总移动距离最小,一个关键的观察是:如果我们将机器人和工厂都按照坐标从小到大排序,那么每个工厂修理的机器人一定是机器人序列中连续的一段。 换句话说,机器人的相对顺序在分配给工厂时不会发生“交叉”。
算法思路
- 排序:首先对机器人数组
robot按坐标升序排序。对工厂数组factory按坐标升序排序。 - 状态定义: 定义
dp[i][j]表示前i个工厂修复前j个机器人的最小总距离。 - 状态转移: 对于第
i个工厂(坐标为pos,容量为limit),我们可以选择让它修理k个机器人,其中。 如果该工厂修理最后 个机器人(即索引从 到 的机器人),则: - 当
时,表示第 i个工厂不修理任何机器人。
- 当
- 边界条件:
dp[0][0] = 0:0个工厂修0个机器人,距离为0。dp[0][j] = infinity(当):没有工厂无法修理机器人。 dp[i][0] = 0:任何数量的工厂修理0个机器人,距离都为0。
- 复杂度分析:
- 时间复杂度:
,其中 是工厂数, 是机器人总数。在本题中 ,计算量约为 ,在可接受范围内。 - 空间复杂度:
,可以通过滚动数组优化到 。
- 时间复杂度:
Python 代码实现
from typing import List
class Solution:
def minimumTotalDistance(self, robot: List[int], factory: List[List[int]]) -> int:
# 1. 排序
robot.sort()
factory.sort()
n = len(robot)
m = len(factory)
# 2. DP 初始化
# dp[i][j] 表示前 i 个工厂修理前 j 个机器人的最小距离
# 初始化为一个足够大的数
inf = float('inf')
dp = [[inf] * (n + 1) for _ in range(m + 1)]
# 边界:0个机器人距离永远是0
for i in range(m + 1):
dp[i][0] = 0
# 3. 状态转移
for i in range(1, m + 1):
pos, limit = factory[i-1]
for j in range(1, n + 1):
# 情况1: 第 i 个工厂一个机器人都不修
dp[i][j] = dp[i-1][j]
# 情况2: 第 i 个工厂修理 k 个机器人 (1 <= k <= limit)
cost = 0
for k in range(1, min(j, limit) + 1):
# 累加第 j-k 个机器人到该工厂的距离
# 注意:robot 索引是从 0 开始的,所以是 j-k
cost += abs(robot[j-k] - pos)
if dp[i-1][j-k] != inf:
dp[i][j] = min(dp[i][j], dp[i-1][j-k] + cost)
return dp[m][n]代码详解
外层循环
i:遍历每一个工厂。中层循环
j:遍历当前考虑的机器人总数。内层循环
k:尝试让当前第i个工厂修理k个机器人。- 我们从第
j个机器人(索引为j-1)开始往前数k个。 cost变量实时累加这k个机器人到当前工厂位置pos的距离之和。dp[i-1][j-k]是前i-1个工厂处理剩余机器人的最优解。
- 我们从第
返回值:
dp[m][n]即为所有工厂处理完所有机器人的最小总距离。该算法利用了排序后的性质,通过动态规划有效地在
时间内解决了分配问题。