T29741: 神经网络之国
卷积、快速幂,http://cs101.openjudge.cn/practice/29741/
852B. Neural Network country, dp, matrices, 2000, https://codeforces.com/problemset/problem/852/B
随着深度学习的兴起,许多国家也变得越来越像神经网络。这些“神经网络国家”被构建成了层级结构,每一层代表一个城市层,具有多个城市,并且整个国家从一个入口城市出发,最终到达一个出口城市。
现在,这个神经网络国家一共有 L 层,每层有 N 个城市。对于任意两个相邻的层 L_1 和 L_2,L_1 中的每个城市都与 L_2 中的每个城市相连。更具体地说,从 L_1 的任意城市出发到 L_2 中的第 j 个城市的代价为 c_j,而这个代价与 L_1 中的起点城市无关(即所有从 L_1 出发到 L_2 的边,指向同一目标城市的代价相同)。
整个国家的路径可以分为三段:
- 从入口点到第 1 层中的每个城市(共 N 个代价)。
- 各相邻层之间的连接代价(每一对相邻层之间有 N 个代价)。
- 从第 L 层中的每个城市到出口点的代价(N 个代价)。
Doctor P. 现在需要你帮助他计算,有多少条从入口到出口的路径,其总代价可以被给定的整数 M 整除。
你只需输出这样的路径条数,结果对 10^9 + 7 取模。
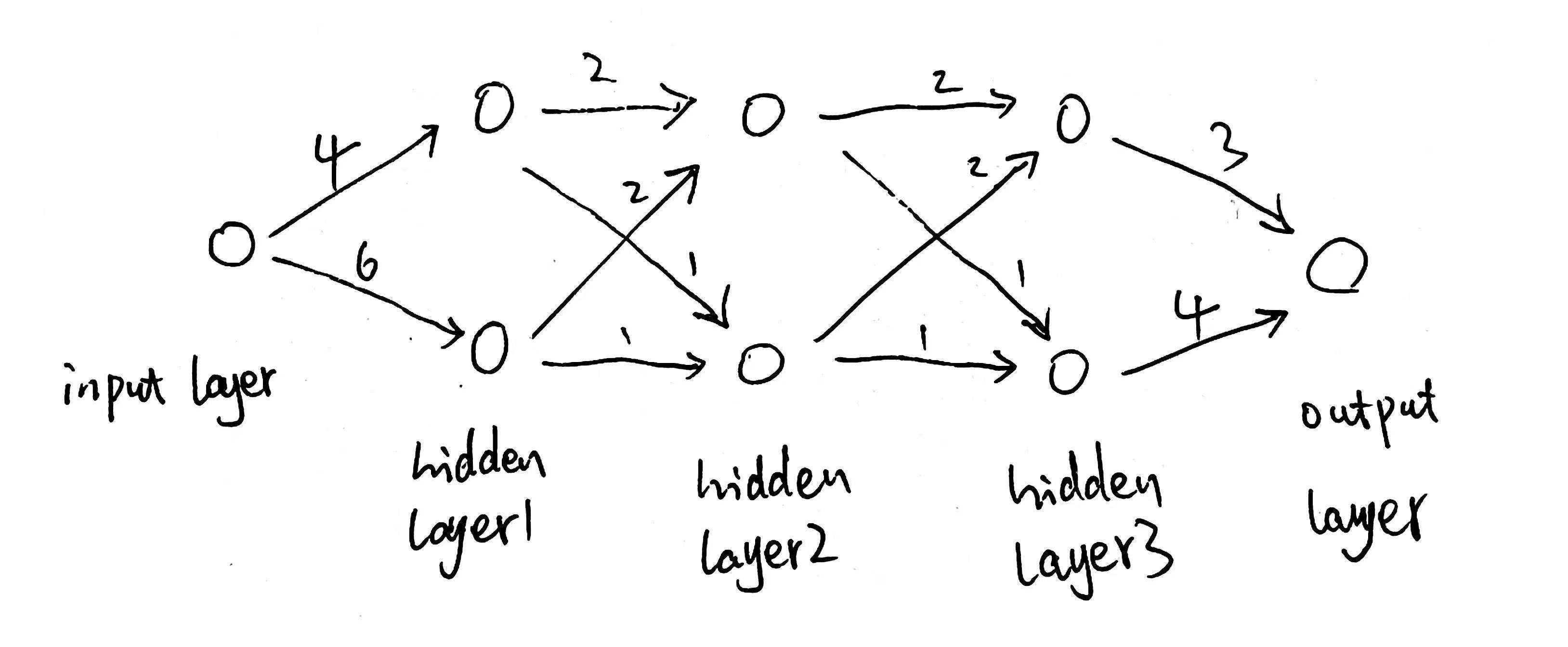
样例图示:
输入
输入共四行。
- 第一行包含三个整数 N, L, M,分别表示每层的城市数量、层数,以及所需整除的代价模数。 - 第二行包含 N 个整数,表示从入口点到第 1 层每个城市的代价。 - 第三行包含 N 个整数,表示任意相邻层之间的代价数组 c_1, c_2, ..., c_N,其中 c_j 表示连接至每层中第 j 个城市的代价。 - 第四行包含 N 个整数,表示从第 L 层的每个城市到出口的代价。
1 <= N <= 10^6
2 <= L <= 10^5
2 <= M <= 100
0 <= cost <= M
输出
输出一个整数,表示从入口到出口总代价可以被 M 整除的路径条数,结果对 10^9 + 7 取模。
样例输入
2 3 13
4 6
2 1
3 4样例输出
2提示
动态规划
该国家结构如下,共有 3 层,每层有 2 个城市:
- 入口到第一层城市的代价分别为 4 和 6。 - 每对相邻层之间,连接至第一个城市的代价为 2,至第二个城市的代价为 1。 - 最后一层到出口的代价分别为 3 和 4。
共计有 N^L = 2^3 = 8 条路径。仅有两条路径的总代价可被 13 整除。
来源
TA-xjk
MOD = 10**9 + 7
import sys
def main():
data = sys.stdin.read().split()
it = iter(data)
N = int(next(it)); L = int(next(it)); M_val = int(next(it))
start = [int(next(it)) for _ in range(N)]
mid = [int(next(it)) for _ in range(N)]
end = [int(next(it)) for _ in range(N)]
M = M_val
# Precompute start_mod
start_mod = [0] * M
for x in start:
start_mod[x % M] += 1
# Precompute mid_mod
mid_mod = [0] * M
for x in mid:
mid_mod[x % M] += 1
# Precompute last_cost = mid + end
last_mod = [0] * M
for i in range(N):
cost = (mid[i] + end[i]) % M
last_mod[cost] += 1
# Convolution function
def convolve(a, b):
res = [0] * M
for i in range(M):
if a[i]:
ai = a[i]
for j in range(M):
if b[j]:
res[(i + j) % M] = (res[(i + j) % M] + ai * b[j]) % MOD
return res
# Identity kernel
identity = [0] * M
identity[0] = 1
if L == 2:
cur = start_mod[:]
else:
# Compute mid_mod^(L-2) under convolution
def power_conv(base, exp):
result = identity[:]
base = base[:]
while exp:
if exp & 1:
result = convolve(result, base)
base = convolve(base, base)
exp //= 2
return result
mid_power = power_conv(mid_mod, L - 2)
cur = convolve(start_mod, mid_power)
# Now combine with last_mod
ans = 0
for r in range(M):
needed = (M - r) % M
ans = (ans + cur[r] * last_mod[needed]) % MOD
print(ans)
if __name__ == '__main__':
main()import sys
# 设置模数
MOD = 10**9 + 7
# 一次性读取所有输入数据,处理速度比 input() 快
data = list(map(int, sys.stdin.read().split()))
idx = 0
# 读取 N, L, M
N = data[idx]; idx += 1
L = data[idx]; idx += 1
M = data[idx]; idx += 1
# 读取三段代价数组
# sta: 入口 -> 第1层
sta = data[idx:idx+N]; idx += N
# mid: 层与层之间 (第i层 -> 第i+1层)
mid = data[idx:idx+N]; idx += N
# end: 第L层 -> 出口
end = data[idx:idx+N]
def convolution(a, b, m):
"""
循环卷积函数
输入: 两个长度为 m 的数组 a, b,分别代表两个阶段的余数频数分布
输出: 卷积后的新分布数组 c
含义: 如果阶段1余数为i,阶段2余数为j,则总余数为 (i+j)%m
"""
c = [0] * m
for i in range(m):
for j in range(m):
# 核心状态转移方程:
# 新余数 = (i + j) % m
# 路径数 = 方案a的数量 * 方案b的数量
c[(i + j) % m] = (c[(i + j) % m] + a[i] * b[j]) % MOD
return c
def fast_power(f, t, m):
"""
基于卷积的快速幂
计算分布 f 自身卷积 t 次的结果
"""
# 初始化“单位元”数组
# 在加法卷积中,单位元是 [1, 0, 0, ..., 0]
# 代表“增加的代价为0”这一种情况,不改变原有的余数分布
re = [0] * m
re[0] = 1
while t > 0:
if t & 1 == 1:
re = convolution(re, f, m)
f = convolution(f, f, m)
t >>= 1
return re
# --- 1. 预处理各阶段的余数分布 ---
# m_sta: 入口到第一层的余数分布
m_sta = [0] * M
for i in sta:
m_sta[i % M] = (m_sta[i % M] + 1) % MOD
# m_mid: 层间转移的余数分布 (用于快速幂)
m_mid = [0] * M
for i in mid:
m_mid[i % M] = (m_mid[i % M] + 1) % MOD
# m_end: 最后一层到出口的余数分布
# 注意:这里做了一个巧妙的合并
# 把 "L-1层 -> L层 (代价mid)" 和 "L层 -> 出口 (代价end)"
# 合并成一步处理:mid[i] + end[i]
m_end = [0] * M
for i in range(N):
# 路径:L-1层任意点 -> L层第i个点 -> 出口
total_cost = (mid[i] + end[i]) % M
m_end[total_cost] = (m_end[total_cost] + 1) % MOD
# --- 2. 计算过程 ---
# 中间层一共要走 L-1 次转移。
# 其中最后一次转移 (L-1 -> L) 我们已经合并到了 m_end 中。
# 所以中间纯粹的层间转移还需要走 (L-1) - 1 = L-2 次。
if L > 2:
m_mid = fast_power(m_mid, L - 2, M)
else:
# 特殊情况:如果 L=2,中间不需要走纯层间转移,
# 快速幂次数为0,fast_power返回单位元,不影响结果
m_mid = fast_power(m_mid, 0, M)
# --- 3. 合并所有阶段 ---
# 第一步:入口分布 * 中间层分布
ans = convolution(m_sta, m_mid, M)
# 第二步:结果 * (最后一层+出口)的分布
ans = convolution(ans, m_end, M)
# --- 4. 输出结果 ---
# ans[0] 表示总代价模 M 余数为 0 的路径条数
print(ans[0])