M2069.模拟行走机器人 II
implementation, https://leetcode.cn/problems/walking-robot-simulation-ii/
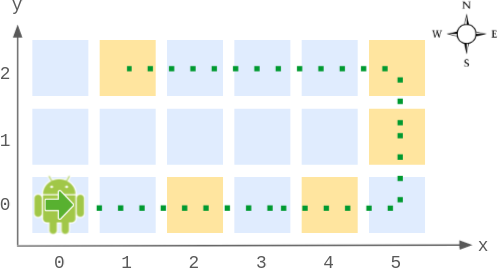
给你一个在 XY 平面上的 width x height 的网格图,左下角 的格子为 (0, 0) ,右上角 的格子为 (width - 1, height - 1) 。网格图中相邻格子为四个基本方向之一("North","East","South" 和 "West")。一个机器人 初始 在格子 (0, 0) ,方向为 "East" 。
机器人可以根据指令移动指定的 步数 。每一步,它可以执行以下操作。
- 沿着当前方向尝试 往前一步 。
- 如果机器人下一步将到达的格子 超出了边界 ,机器人会 逆时针 转 90 度,然后再尝试往前一步。
如果机器人完成了指令要求的移动步数,它将停止移动并等待下一个指令。
请你实现 Robot 类:
Robot(int width, int height)初始化一个width x height的网格图,机器人初始在(0, 0),方向朝"East"。void step(int num)给机器人下达前进num步的指令。int[] getPos()返回机器人当前所处的格子位置,用一个长度为 2 的数组[x, y]表示。String getDir()返回当前机器人的朝向,为"North","East","South"或者"West"。
示例 1:
输入:
["Robot", "step", "step", "getPos", "getDir", "step", "step", "step", "getPos", "getDir"]
[[6, 3], [2], [2], [], [], [2], [1], [4], [], []]
输出:
[null, null, null, [4, 0], "East", null, null, null, [1, 2], "West"]
解释:
Robot robot = new Robot(6, 3); // 初始化网格图,机器人在 (0, 0) ,朝东。
robot.step(2); // 机器人朝东移动 2 步,到达 (2, 0) ,并朝东。
robot.step(2); // 机器人朝东移动 2 步,到达 (4, 0) ,并朝东。
robot.getPos(); // 返回 [4, 0]
robot.getDir(); // 返回 "East"
robot.step(2); // 朝东移动 1 步到达 (5, 0) ,并朝东。
// 下一步继续往东移动将出界,所以逆时针转变方向朝北。
// 然后,往北移动 1 步到达 (5, 1) ,并朝北。
robot.step(1); // 朝北移动 1 步到达 (5, 2) ,并朝 北 (不是朝西)。
robot.step(4); // 下一步继续往北移动将出界,所以逆时针转变方向朝西。
// 然后,移动 4 步到 (1, 2) ,并朝西。
robot.getPos(); // 返回 [1, 2]
robot.getDir(); // 返回 "West"提示:
2 <= width, height <= 1001 <= num <= 10^5step,getPos和getDir总共 调用次数不超过10^4次。
这道题的核心在于观察机器人的移动轨迹。机器人实际上是在网格的边界(外圈)上循环移动。
解题思路
周长与循环:机器人只会在网格的四条边上移动。总的周长
。由于机器人一直在边界循环,我们可以对步数 取模。 特殊情况((0,0)点):
- 初始状态:位置
,方向 "East"。 - 移动一圈回到
后:位置 ,由于是由于从南边边界顶到头转弯回来的,方向会变为 "South"。 - 为了处理这个逻辑,如果移动步数取模后为 0,且已经发生过移动,我们需要判断它是在哪个位置。如果回到了起点,方向应设为
"South"。
- 初始状态:位置
轨迹建模:我们可以预先计算出边界上所有点的坐标和对应的方向,或者根据步数
所落在的区间来计算: 0 < num <= width - 1: 在底边,向东。width - 1 < num <= (width-1) + (height-1): 在右边,向北。(width-1) + (height-1) < num <= 2*(width-1) + (height-1): 在顶边,向西。- 其他: 在左边,向南。
代码实现
class Robot:
def __init__(self, width: int, height: int):
self.w = width
self.h = height
self.pos = 0 # 用相对于(0,0)沿边界走的步数来记录位置
self.perimeter = 2 * (width - 1) + 2 * (height - 1)
self.moved = False
def step(self, num: int) -> None:
self.moved = True
# 取模减少无效循环
self.pos = (self.pos + num) % self.perimeter
def getPos(self) -> List[int]:
p = self.pos
w, h = self.w, self.h
# 底部边: [0, w-1]
if p < w:
return [p, 0]
# 右侧边: [w, w + h - 2] (减去重复的角点)
if p < w + h - 1:
return [w - 1, p - (w - 1)]
# 顶部边
if p < 2 * w + h - 2:
return [w - 1 - (p - (w + h - 2)), h - 1]
# 左侧边
return [0, h - 1 - (p - (2 * w + h - 3))]
def getDir(self) -> str:
# 特殊处理:回到起点的情况
if self.moved and self.pos == 0:
return "South"
p = self.pos
w, h = self.w, self.h
# 初始状态且未移动
if not self.moved:
return "East"
# 根据当前步数所处的范围判断方向
# 注意:边界点在转向后,方向会立即变为新边的方向
if 0 < p <= w - 1:
return "East"
elif w - 1 < p <= w + h - 2:
return "North"
elif w + h - 2 < p <= 2 * w + h - 3:
return "West"
else:
return "South"关键点解释
self.moved标志位:这是为了区分“从未移动过的”和“走了一圈回到 ”。 - 方向判定范围:
- 当机器人走到拐角点(例如
)时,如果它是动作的终点,它的方向取决于它是如何到达这里的。如果步数正好落在 w-1,它依然是"East";如果超过了w-1,它就会转向。 - 取模运算
num % perimeter会导致原本回到原点应为"South"的情况变成0。代码中通过if self.pos == 0 and self.moved专门捕获了这一逻辑。
- 当机器人走到拐角点(例如
Q: 周长为什么不是 2 * (width + height) ?
这是一个非常经典且容易混淆的“植树问题”(或称为点与间距的问题)。
在网格坐标系中,周长指的是机器人可以移动的总步数。让我们通过一个具体的例子来直观理解。
假设网格是
width = 4, height = 3: 坐标范围是。 1. 手动数一下边界上的格子
机器人沿着边界走一圈经过的路径如下:
- 底边:从 (0,0) 到 (3,0),移动了 3 步。
- 右边:从 (3,0) 到 (3,2),移动了 2 步。
- 顶边:从 (3,2) 到 (0,2),移动了 3 步。
- 左边:从 (0,2) 到 (0,0),移动了 2 步。
总步数 = 3 + 2 + 3 + 2 = 10 步。
2. 公式计算
如果我们使用
: —— 错误。 如果我们使用
: —— 正确。 3. 为什么是
? 因为周长计算的是相邻格子之间的间隙(步数),而不是格子的总数。
- 横向有
width个格子,但只有width - 1段距离。- 纵向有
height个格子,但只有height - 1段距离。4. 形象理解:四个顶点
如果你直接用
,你会发现四个角上的点被重复计算了两次。 为了修正,你需要减去重复算的 4 个角: 这等同于:
总结
在 XY 坐标系网格中,宽度为
高度为 的矩形轨迹,其外围周长(总步数)恒等于: