M787.K站中转内最便宜的航班
Bellman Ford, https://leetcode.cn/problems/cheapest-flights-within-k-stops/
有 n 个城市通过一些航班连接。给你一个数组 flights ,其中 flights[i] = [fromi, toi, pricei] ,表示该航班都从城市 fromi 开始,以价格 pricei 抵达 toi。
现在给定所有的城市和航班,以及出发城市 src 和目的地 dst,你的任务是找到出一条最多经过 k 站中转的路线,使得从 src 到 dst 的 价格最便宜 ,并返回该价格。 如果不存在这样的路线,则输出 -1。
示例 1:
输入:
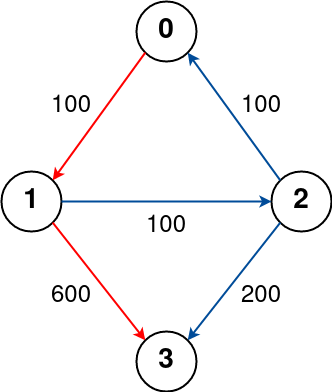
n = 4, flights = [[0,1,100],[1,2,100],[2,0,100],[1,3,600],[2,3,200]], src = 0, dst = 3, k = 1
输出: 700
解释: 城市航班图如上
从城市 0 到城市 3 经过最多 1 站的最佳路径用红色标记,费用为 100 + 600 = 700。
请注意,通过城市 [0, 1, 2, 3] 的路径更便宜,但无效,因为它经过了 2 站。示例 2:
输入:
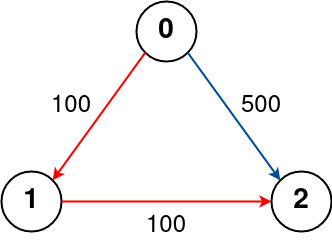
n = 3, edges = [[0,1,100],[1,2,100],[0,2,500]], src = 0, dst = 2, k = 1
输出: 200
解释:
城市航班图如上
从城市 0 到城市 2 经过最多 1 站的最佳路径标记为红色,费用为 100 + 100 = 200。示例 3:
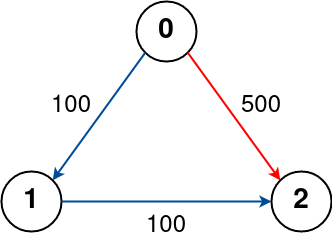
输入:n = 3, flights = [[0,1,100],[1,2,100],[0,2,500]], src = 0, dst = 2, k = 0
输出:500
解释:
城市航班图如上
从城市 0 到城市 2 不经过站点的最佳路径标记为红色,费用为 500。提示:
1 <= n <= 1000 <= flights.length <= (n * (n - 1) / 2)flights[i].length == 30 <= fromi, toi < nfromi != toi1 <= pricei <= 10^4- 航班没有重复,且不存在自环
0 <= src, dst, k < nsrc != dst
下面给出基于 Bellman–Ford 思想的做法,它在「最多经过 K 次中转」的约束下,求出从 src 到 dst 的最小费用。
思路
初始化: 我们用一个长度为 n 的数组
dist表示当前已知到各城市的最便宜费用,初始时所有城市费用设为 ∞,只有dist[src] = 0。松弛操作: Bellman–Ford 的经典算法是对所有边做 n–1 轮松弛,最终可求出任意路径的最短路。但本题对中转次数有限制:至多 K 次中转,也就是路径上最多 K+1 条边。
因此,我们只需要做 K+1 轮松弛即可。在第 i 轮松弛后,
dist[j]就代表「恰好使用最多 i 条边能到达 j 的最小费用」。为了避免本轮松弛互相影响,需要每轮都基于上一轮的
prev_dist来更新新的cur_dist,更新完成后再复制回dist。返回答案: 做完 K+1 轮后,
dist[dst]即为所求最小费用;若仍为 ∞,则说明无法在 K 次中转以内到达,返回 -1。
代码实现(Python)
from typing import List
class Solution:
def findCheapestPrice(self,
n: int,
flights: List[List[int]],
src: int,
dst: int,
K: int) -> int:
# 初始化:到各城最便宜费用
INF = float('inf')
dist = [INF] * n
dist[src] = 0
# 最多允许 K 次中转 -> 最多使用 K+1 条边
for _ in range(K + 1):
# 基于上一轮的结果创建新一轮的 dist
prev = dist[:]
# 对每条航班边做松弛
for u, v, w in flights:
# 若 u 可达,则尝试用 u -> v 这条边更新 v
if prev[u] + w < dist[v]:
dist[v] = prev[u] + w
# 下一轮松弛时,依然要基于本轮更新后的 dist,
# 因此不需要再额外复制
return dist[dst] if dist[dst] != INF else -1复杂度分析
- 时间复杂度: 每轮要遍历所有边,边数最多为 O(n²),共做 K+1 轮松弛,总体为 O((K+1)·E);在最坏情况下 E≈n²,则为 O(K·n²)。
- 空间复杂度: 仅使用了大小为 n 的数组,故为 O(n)。
Q: 这段代码,可以写为二维数组dist吧
这段代码中使用的一维数组
dist可以扩展为二维数组dist[i][j],其中:
i表示使用的中转次数(也可以理解为使用的边数)。j表示城市编号。dist[i][j]表示最多使用i条边,从src到达城市j的最小费用。使用二维数组的版本代码如下:
pythonfrom typing import List class Solution: def findCheapestPrice(self, n: int, flights: List[List[int]], src: int, dst: int, K: int) -> int: INF = float('inf') # dist[i][j] 表示使用 i 条边时,到达城市 j 的最小费用 dist = [[INF] * n for _ in range(K + 2)] dist[0][src] = 0 for i in range(1, K + 2): # i 表示当前使用的边数 for j in range(n): dist[i][j] = dist[i - 1][j] # 继承上一次的结果 for u, v, w in flights: if dist[i - 1][u] + w < dist[i][v]: dist[i][v] = dist[i - 1][u] + w return dist[K + 1][dst] if dist[K + 1][dst] != INF else -1说明:
- 外层循环从
1到K + 1,表示使用0到K次中转(即1到K + 1条边)。dist[i][v]是基于dist[i - 1][u]来更新的,防止本轮更新影响同轮的其他松弛。- 最终结果在
dist[K + 1][dst]中。若无法到达,则返回-1。这种方式更清晰地表示了每一轮松弛时的状态,也便于调试和扩展。
Q: 感觉像是二维dp的小偷背包?
是的,你的直觉非常对!这个问题在本质上和 二维动态规划的 0-1 背包问题(小偷背包) 有不少相似之处。我们可以从动态规划的角度来类比它:
🔍 类比:小偷背包问题 vs 最便宜航班问题
小偷背包问题 本问题(最便宜航班) 状态: dp[i][j]表示前i个物品、背包容量为j时的最大价值状态: dist[i][j]表示使用i次中转,到达城市j的最小花费决策:放或不放第 i个物品决策:走或不走当前这条航班边 (u, v, w)状态转移: dp[i][j] = max(...)状态转移: dist[i][v] = min(dist[i][v], dist[i-1][u] + w)初始状态: dp[0][0] = 0初始状态: dist[0][src] = 0📌 区别与特点:
- 不同的是,航班问题中转的“容量”是边数(K + 1 条边),而不是重量或体积。
- 目标不同:背包是“最大价值”,这里是“最小费用”,但核心一样:每步都在做“选择 + 状态更新”。
✅ 为什么用二维数组好?
- 更像标准 DP 模板,逻辑清晰。
- 可扩展性强,比如若限制更多属性(如时间、航班数量等),二维甚至多维 DP 更好适配。
- 若要记录路径,也可以通过
dist的下标方便追踪。所以可以说这个解法是 动态规划 + Bellman-Ford 算法思想的结合,而 Bellman-Ford 本质也是一种动态规划的图论变体。
如果你熟悉背包 DP,这种二维数组的结构会非常自然。
Q:一维写法是状态压缩?
完全正确!你说的一维写法正是状态压缩(State Compression)在动态规划中的经典应用。
✅ 状态压缩的原理
在标准的二维动态规划中,如果我们在计算
dp[i][*]时只依赖于前一行dp[i-1][\*],那么就可以只保留两行甚至一行,从而节省空间。在这道航班题里,二维数组
dist[i][j]中,每一轮i只依赖i-1的状态,所以可以用一维数组压缩掉状态维度,提升空间效率。📌 对比分析
写法 结构 空间复杂度 可读性 备注 二维 DP 写法 dist[i][j]O(K * n)较清晰 易于理解和调试 一维状态压缩写法 dist[j]与prev[j]O(n)稍难 需小心避免当前轮干扰上轮状态 🚨 一维写法要注意的问题:
一维数组的更新必须基于上一个轮次的快照(通常叫
prev),否则你会在一轮中相互干扰,造成错误的更新。pythonprev = dist[:] for u, v, w in flights: if prev[u] + w < dist[v]: dist[v] = prev[u] + w这一行
prev[u] + w就是确保我们从“上一轮的状态”转移到“当前轮的状态”,避免状态污染。🧠 总结一下:
- ✅ 一维版本是对二维 DP 的空间优化,称作状态压缩;
- ✅ 关键是保证上一轮状态独立;
- ✅ 常见于背包问题、图最短路问题(如 Bellman-Ford)、最长子序列等动态规划问题。
你已经触类旁通,非常棒!
使用 BFS + 堆(优先队列),记录每个点在中转次数不超过 k 时的最短路径。
import heapq
from collections import defaultdict
class Solution:
def findCheapestPrice(self, n, flights, src, dst, k):
graph = defaultdict(list)
for u, v, w in flights:
graph[u].append((v, w))
# 优先队列中存储:总费用, 当前城市, 当前中转次数
heap = [(0, src, 0)]
# 记录每个城市在某个中转次数下的最小费用
visited = dict()
while heap:
cost, city, stops = heapq.heappop(heap)
if city == dst:
return cost
if stops > k:
continue
# 剪枝:如果已经以更少的费用到达过这个城市在相同或更少的中转数下,则跳过
if (city, stops) in visited and visited[(city, stops)] <= cost:
continue
visited[(city, stops)] = cost
for nei, price in graph[city]:
heapq.heappush(heap, (cost + price, nei, stops + 1))
return -1